|
|
接触式真空吸取技术广泛应用于工农业生产和人民生活中,利用负压来夹持工件,具有成本低廉、结构简单、使用方便等优点。真空吸取的执行器为真空吸盘,采用负压抽吸等方法在吸盘内产生一定的真空度,从而吸着工件。
5 }5 E6 a C) R% A- g! F5 ~7 d( T' x& n1 N
在半导体工业中,利用真空吸盘显像管、包装盒等工件,完成物流输送、自动装配等工序;
8 t4 l# O; A/ ~7 B4 i L% H' [# Z7 V% T: d5 [
在食品生产与加工中,真空吸盘运送糕点、瓜果等食品,免人工,安全卫生而高效;
* K. u0 ^0 D9 L( h( n1 b) N! ?7 c4 s7 H" A' X
在新兴的机器人技术领域,爬墙机器人安装了真空吸盘,轻松地吸附于高层建筑墙面,服务型机器人末端的真空吸盘则为服务对象快速安全地拿取所需的物品。
. V" r) E0 z' X% p/ @1 M @& s% v% e) v% r
真空吸盘易实现柔性夹持,对物件表面损伤小,具有安全、可靠、价格低廉、轻便、节能等优点,而气压驱动的高柔顺性更易于实现仿生结构,具有良好的前景。 ( B/ L- ?5 C2 S. P ~ G# r4 \3 }4 o
* b( _- v4 a: B' [5 m1 } 1、夹持需求 ) W/ L q. D$ i
6 S& E; e4 |/ D( L7 U: p
夹持需求包括两个方面:
" o3 x/ l- L' @0 ]0 V* d% E1 r8 T% n! s, u" J5 u6 N* h5 r
①吸盘能适应物件的形状,与物件有效贴合。
7 N" L% y4 o `; F$ ~
2 d8 v! U/ S6 k' ^ \ ②提供可靠的真空度。
& ]" t' `: `1 G# Y" p
& e+ O: M5 ~# i/ U9 C$ w1 G 接触式真空吸取技术,为自动化物流和机器人提供了便利的真空夹持方法,而生产技术的进步又对真空吸取技术提出了更高的要求,夹持工作环境趋于多样化,例如: : V8 X5 M F' p+ L
- Q4 }, _1 U" b( y n# M# V
人类探寻海洋深处的秘密需要适应水下环境;
$ c) M+ k9 x. ]" E
5 ]. r" N% b6 w1 `* A 空间探测则需要适应宇宙环境;
+ Z. P) s, X" a8 v( J# F$ k4 h
i! n/ v L9 a! U) @/ \4 v 混流生产工件形状的多元化需要夹持器能适应多种工件形状;
5 V5 c5 F0 p. x8 z8 s( ] k% A! N- U& o0 D$ Y8 F: O* Z
社会服务需求的增多,需要大量能提供生活服务的机器人,而这些机器人是否具有灵活可靠的夹持末端,大大影响服务的效果;
+ Q2 H) \9 q4 ]) h: h' I) ~- [
+ \ a. M- b# Y& _ N 全球性能源短缺,使得节约能源成为人类的迫切需求。
) i) A6 `6 U* I! @2 }2 i
9 Y& H* G+ T) ? 这些新要求促使接触式真空吸取技术朝着多工况适应、多形状夹持、高效节能等方向发展。 , O3 t7 y- T1 h' {5 a
) z+ \& K- T2 ^7 @ 2、接触式真空吸取技术研究现状
* {1 M) V% r0 O7 O( |
7 h3 f9 u8 N1 J7 n( U* ^1 T 2.1、真空吸盘结构形式
( J5 y& @! d5 L% x; g$ M* B5 _( a7 L& x5 @2 A% J' x
真空吸盘为接触式真空吸取的末端执行器。常规吸盘的材料为丁腈橡胶、硅橡胶、聚氨酯、氟化橡胶等弹性较好的非金属材料,结构形式多为平直型、深凹型、风琴型等,并可根据工件的结构尺寸专门设计微型或大型吸盘。
0 a6 X7 P7 {4 J, }4 m' Z
U8 g' g( u# a0 H+ s' G0 U% b: M 针对现行负压吸盘的刚度和形状不能调整所带来的问题,国内外研究者对吸盘材质和形状进行了研究和探索。通过在吸盘连接处设计缓冲连接器,改变缓冲连接器的弹性和形状来调节吸盘的刚度和夹持耦合面,以适应更多工作条件的要求。图1为球铰式吸盘,吸盘可适应工件吸附表面的倾斜而自由转动,吸盘体上的抽吸孔通过贯穿球节的孔,与安装在球节端部的吸盘相通。
# {/ O- C; Y1 J9 G* z8 I- R% u5 \2 p/ l# L
由于单个吸盘提供的吸着面有限,在实际运用中常采用多个吸盘一起工作的安装方式。
' D W% A3 w3 n9 v. ?5 u1 m0 T- k
叶鹏等发明了一种具有姿态自主检测和吸附面自适应能力的负压吸附模块(图2),通过倾角传感器测量吸附模块相对于吸附面的位置和姿态,通过距离传感器测距,计算出吸盘面与被吸附面间的夹角和距离,从而调整装置的位置参数,更好地适应吸附面。 8 [7 y. U. C0 K0 ]' p) m
8 B3 Y! F8 a9 |6 j% o W& k# m& o 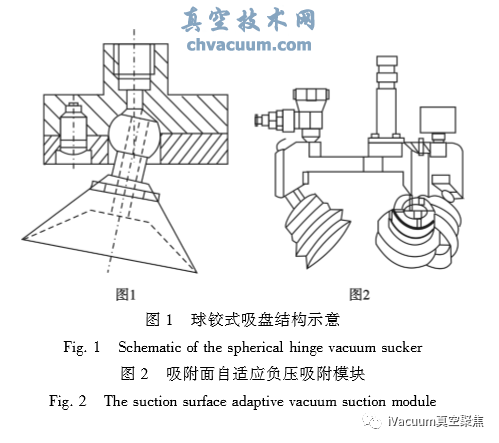
* {2 q6 n6 [. ^
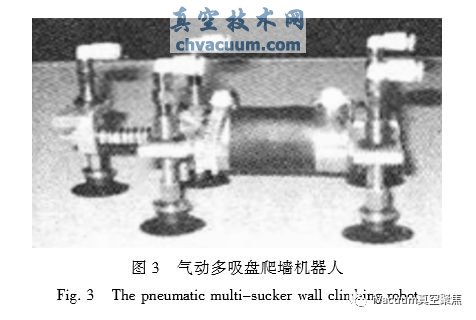
/ E o8 T6 ~' y5 ]) X& l 孙锦山等研制了气动多吸盘爬墙机器人(图3),多个吸盘提供了更大的吸着面。与图2所示装置不同,各吸盘之间采用了柔性驱动器连接,能实现一定范围内的弯曲,由于吸盘之间的相对位置可以随柔性驱动器的弯曲而改变,因此控制策略更为简单。
5 l: E6 ]9 \8 Q) S* ^& A0 K3 I! e L; {1 L
 ' R+ d) G$ {! R ' R+ d) G$ {! R
. C% \9 s7 |0 P q' n 2.2、真空吸取力产生方法 ( ^+ x0 V0 f7 n" ~. b3 X
8 n6 H, Y- J* x0 F s' n 将吸盘腔室内的气体抽去,从而产生负压吸引力,是最基础的吸取力产生方式,这种方法的前提是吸盘需和物体紧密接触,使吸盘腔室密闭。通过吸盘对物体的贴附,产生密闭腔室,采用真空泵或其他真空发生元件产生真空。 |
|

 窥视卡
窥视卡 雷达卡
雷达卡 发表于 2025-7-22 10:35:06
发表于 2025-7-22 10:35:06
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 显身卡
显身卡