|
|
EAST 高频弹丸注入装置主要用于完成EAST 托卡马克装置的加料和边界局域模(ELM) 实验研究。注入器主体部分已经完成构建,为了使系统安全连接到EAST 装置,需要设计一套对应的真空系统。高频弹丸注入装置真空系统采用了全新的设计,在注入器主体上连接三个缓冲室,将推进气体及时抽走,降低成冰室压强以此提高成冰质量。注入器与EAST 装置通过两级差分系统连接,进一步降低装置压强至5×10-4 Pa量级,完成与EAST 的安全连接不影响正常放电。
3 H$ ^; Y$ f! q$ X
# X3 L, ]9 [& I2 {' I' S EAST 是世界上第一个全超导非圆截面托卡马克装置。自2006 年首次成功放电以来,实验参数得到不断提高。在等离子体高约束运行模式(H-mode)下爆发的边界局域模(ELM)会对装置第一壁造成极大的热冲击,降低第一壁材料使用寿命。如何应对这种现象已经成为聚变界一个棘手的问题。最新的研究表明,高频弹丸注入技术是一种行之有效的控制ELM 的手段。参考低频弹丸注入装置的设计,构建了一套全新的高频弹丸注入装置。新系统的氢/氘弹丸最高注入频率可达50 Hz,为了满足新系统对真空度的要求,需要设计一套真空系统。 $ u c" S% }; ?" B+ s( ~
1、概述
* ~' w* Y. p: T1 N
- W) ^: d+ l/ r6 C: t0 @3 N; O# G0 t 低频弹丸注入装置于2012 年首次投入EAST实验,能以最高10 Hz 的工作频率发射氢/氘弹丸为EAST 装置加料。为了保证在运行过程中,推进气体(氦气)不会大量进入EAST 主真空室中,低频弹丸注入装置采用了两级差分的真空系统设计,其结构如图1 所示。第一级差分室体积17 L连接一体积355 L 膨胀室,用抽速470 L/s 的罗兹泵机组抽气;第二级差分室体积17 L 直接连接FF-200 复合分子泵机组抽气。在运行过程中,能保证第二级差分真空度维持在10-4 Pa 左右,在这样的真空环境下,推进气体对EAST 主真空的影响可忽略。但是低频弹丸系统在长时间连续工作的情况下,第二级差分室真空度会慢慢变差,需要暂停运行一段时间,等真空度恢复到正常水平,才能继续工作。因为大量推进气体会在第一级差分处积累,不能被及时抽走。
" t& u0 O* c8 \- o+ c0 \
$ E; d$ X( \# y+ ]8 d$ L( ^. m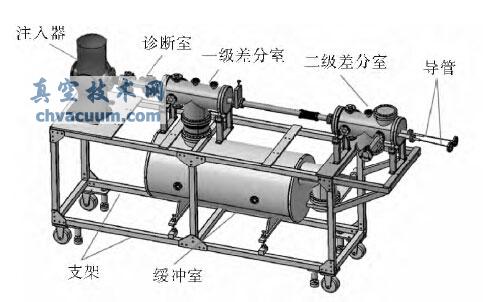
+ k: J- O( P, R( M$ n& `
% x; Z. d5 Q- L/ ]6 r3 P$ S5 m图1 低频弹丸注入装置三维示意图
. s9 H- n3 a* s4 I6 S0 a8 K5 Y! s$ z6 T, ~
高频弹丸注入装置与低频系统基本原理相似,也是利用液氦降温冷凝氢/ 氘气体,通过机械挤压、切割的方式制成弹丸,最终用高压氦气加速弹丸通过细长管道打入到EAST 主真空室内。高频弹丸为一直径1.5 mm,长度1.2 至1.8 mm 可调的圆柱体,其发射速度根据设定的推进气体压强不同,在150 至250 m/s 之间变化。除此之外,高频系统的最大工作频率高达50 Hz,发射每发弹丸大概需要消耗20-30 mbar·L 的氦气,这样大量的氦气不及时抽走,会影响到EAST 装置的正常放电。为了消除氦气的影响,并克服低频系统存在的问题,借鉴低频弹丸系统的两级差分结构,并在此基础上做了一些改进,设计了这套高频弹丸注入装置真空系统。
0 e: F) F, x! A7 d$ P: `4 Z
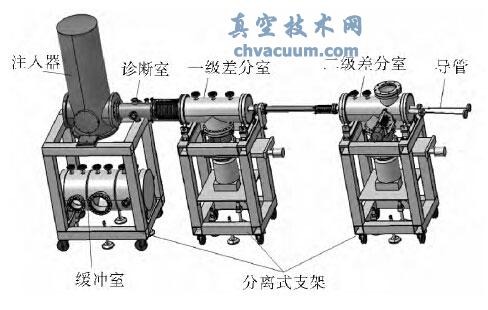
6 E2 O1 K) u2 @; Q# I4 r6 L 高频弹丸注入装置真空系统主要由缓冲室,两级差分室,真空泵组,以及真空测量部件和连接管道等组成。为了确保推进气体不会进入EAST 主真空室,需要限定了两级差分室的真空度,即连接EAST 主真空室的条件,详见表1。采用两级差分室的结构设计,能够最大限度的减少进入EAST 主真空室的气量。真空各部件安装在支架上,中心与注入器注入管路保持同一水平高度,其结构示意如图2 所示。新的真空系统将缓冲室移至注入器主体下部,在弹丸成型加速阶段起到扩散和抽走多余氦气的作用。新的缓冲室设计不但减小了后部两级差分室的工作负载,还大大提高了弹丸成冰的质量和可靠性。
! H: r/ q- C5 h" s
: N9 b. U+ Q; ^3 |表1 两级差分室的工作真空度要求
. X% Z, K1 Q) w( p8 }3 Y0 z) m" Q! J$ U( {4 M
 # w& T+ o- h; f7 D& r% z# `3 V # w& T+ o- h; f7 D& r% z# `3 V
+ z8 B1 \6 S2 a* {' a0 f& x6 V- Z
 3 R; k8 y: w% p% y% B) u 3 R; k8 y: w% p% y% B) u
4 r8 j! X( X7 i. X0 O9 q
图2 高频弹丸注入装置三维示意图 + [/ j) j: W+ {+ [# v3 P" ?9 _4 k
2、真空差分系统设计
8 G5 J3 N" P! b! }3 {' |
$ {: y0 L% O1 K4 S- O' v. |# J 2.1、缓冲室设计 % Z4 ~) w+ \- ^* i( u
' b* F7 |, I- @- f/ C6 x& p0 i
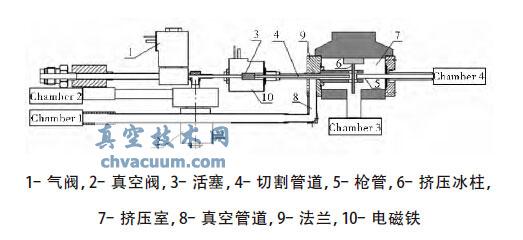
全新的弹丸注入器包括两套独立的注入系统,每套系统能够以25 Hz 的频率独立工作发射弹丸。高频的特性对系统的可靠性提出了要求,为了提高弹丸的成型质量和可靠性,在弹丸成型和加速系统上连接一个缓冲室。缓冲室与弹丸成型和加速系统的连接简图,如图3 所示。图2 中的真空室1、真空室2 和真空室3 首尾相连,共同组成了缓冲室,见图4,而真空室4 则代表了真空系统后部的诊断室、和两级差分室。弹丸加速期间,推进气体扩散到缓冲室的三个真空室内,被真空泵组抽走,减少挤压成冰室内的推进气体量,从而提高成冰质量。 ) q. i2 L# P5 s, _/ L
* S( m. _; Z/ l5 |
 f9 W: R9 r k f9 W: R9 r k
3 r4 Q. {6 f3 c% I2 m6 z3 i
图3 弹丸成型和加速系统简图
; y) v' e9 f( V1 J, N V+ ~" p8 {
4 M# F |+ r) f. ~; ?! k- \ 一套弹丸加速和成型系统已经制造完成,并做了一些基本的台面测试,得到了一些初步的测试数据,其中每发弹丸造成的气体载荷分布见表2。由于弹丸注入器正常工作时气载很大,尤其是缓冲室中的真空室2,因此选用大抽速470 L/s的罗兹泵机组(WAU2001/SV630B)来作为真空室2 的泵组, 选用抽速203 L/s 的罗兹泵机组(WAU1001/SV300B)作为真空室1 的泵组。真空室3 连接挤压成冰室,主要用于抽除废冰和废气,选用的是抽速16.6 L/s 的无油涡旋真空泵(GWSP10000)。
% Z8 [# }+ l) D( @5 D% ?
( y5 d' H, _; F3 V* w2 q* q; P/ M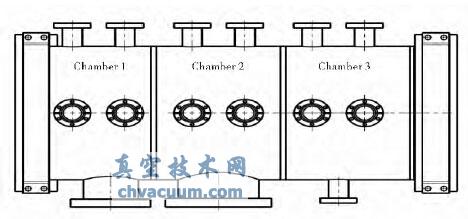
; a: s( ]9 X! V: {" j$ M
5 ~" ^8 }6 ?, H# h9 Q- V# O+ l图4 缓冲室结构简图 % x9 s% t) ?, B# z7 c0 A# O
( G8 ~" f1 ]7 T9 @ 由于初步测试时只采用了一套弹丸加速和成型系统,并且初期测试所用的泵组与后续两套一并安装时所用泵组并不一致,需要对缓冲室的体积结构等重新进行设计,充分考虑两套系统同时以最大载荷工作的情况。为了能够最大限度的发挥真空泵机组的性能,保证将推进气体尽量地排出,设计初均假设罗兹泵机组工作在最大抽速,也就是假定工作压强为百帕量级,初步假设为500 Pa。考虑了气载、压强、连接管道等因素后,选定三个真空室体积均为21.43 L。真空室1用内径100 mm,长度3.3 m 的管道连接罗兹泵机组;真空室2 用内径150 mm,长度3.3 m 的管道连接罗兹泵机组;真空室3 用普通KF40 接头(内径约为35 mm),长1 m 波纹管连接。 5 j% q- I) O$ `9 P; _5 ]* M. z( e1 d
7 l6 d. C L% U5 Y* A
表2 单发弹丸推进气体载荷分布
5 |, `, S/ F5 z n H
$ T+ X' _6 ]& k' }" K7 Y* } 9 b* {2 {2 d2 s& O/ H& Q 9 b* {2 {2 d2 s& O/ H& Q
- z& t/ V% x, V% W9 U* ^2 J
根据前面的假设,管道中的平均压强,三个真空室的P D 值均大于0.67 Pa·m,管道中的流态为粘滞流。根据气流状态,选择流导公式(1)进行计算: . a& j! F n3 G* K) g+ d6 M4 H
# f; c% _7 _# m
 1 G/ b7 o2 e( W% r `7 q9 I# a 1 G/ b7 o2 e( W% r `7 q9 I# a
' c7 K( x& @7 h( E4 S
代入数据,真空室1 管道流导为20303 L/s,真空室2 管道流导为102784 L/s, 真空室3 管道流导为1005 L/s。再根据有效抽速公式(2),计算各真空泵的有效抽速: % T( n/ a! k7 q) Y4 w( I
8 A1 Z( w& B) Z/ y O0 W: U. n' F * L; }8 `, a$ M+ S. L) t" E3 N * L; }8 `, a$ M+ S. L) t" E3 N
$ l: Z. X( T+ e
代入得,真空室1 罗兹泵机组有效抽速201 L/s,真空室2 罗兹泵机组有效抽速467 L/s,真空室3无油涡旋真空泵有效抽速为11.5 L/s。由上面计算得到的有效抽速,并根据公式(3)计算抽气平衡时,真空室内的压强: % u, {% Y" \$ u1 T8 l, k
* h( A- A' J1 t& U* a
: ]8 }' V5 R7 y7 e O' l" L
4 r7 d- h! Z9 p 而气体载荷又根据单发弹丸的气载(取最大值)乘上频率,也就是最大频率50 Hz,可得真空室1 的气载为3×104 Pa·L/s,真空室2 的气载为7.5×104 Pa·L/s,真空室3 的气载为1×104 Pa·L/s。将各数据代入,得真空室1 的实际稳态工作压强为150 Pa,真空室2 的实际稳态工作压强为161 Pa,真空室3 的实际稳态工作压强是869 Pa。查看个泵组的工作压强- 抽速曲线,均能达到最大抽速,而因为管道连接部件的流导非常大,所以实际的工作压强对上述的计算过程影响非常小,可以直接认为计算结果与初期的假设是吻合的。所以说缓冲室的设计在理论上是可行的,可以满足设计要求,降低了推进气体进入挤压成冰室的可能,提高了成冰质量。
' W) t1 |6 e+ Q+ K$ g5 c2 i0 Q! X. J7 b. Z! U
2.2、两级差分室设计
: U) S8 a9 z9 o! ^
) H0 n, T; d) {( O, J6 p6 g" {- M 为了进一步的降低系统的压强, 达到与EAST 主真空连接的条件,需要采用两级差分真空室的结构。两级差分室的主要作用是进一步的抽除多余的推进气体氦气,使第二级差分室的压强稳定在10-4 量级或以下,保证高频弹丸注入系统在正常运行过程中能够正常与EAST 主真空连接,而不影响EAST 装置的正常放电。
/ |) d u+ i4 F; y2 v7 a2 c; A
) A2 w) w7 F+ {* }/ z% u. b; q 两级差分室在结构上相似,两个真空室的体积都是约17 L,均采用机械泵前级搭配Turbo-V1001 分子泵抽气,对氦气的抽速在870 L/s 左右。第一级差分室: : X: L3 i3 k( y0 Z
+ l7 J9 V% y# H 前面表二中气体载荷分布数据,是在缓冲室均连接机械泵的情况下得到的,而我们重新搭建的系统采用的是大抽速的罗兹泵机组,除此之外,我们还会将诊断室的一个法兰连接到缓冲室二号罗兹泵机组上。在这样的情况下,前面提到的单发弹丸进入到图3 中真空室4 的气体载荷应该会大大减小。单发弹丸引入的推进气体按照30 mbar·L 来记,经过模拟计算,其中29 mbar·L的气体都会被前端的两套罗兹泵机组和干泵抽走,进入到第一级差分室的气量大约为1 mbar·L。分子泵直接连接在差分室下部,流导很大, 8 c# K$ F! S8 d" H p( N4 _
; T# H9 @0 ~" W" \0 F4 W) z6 V 对泵的抽速影响很小。我们可以认为泵的额定抽速即为有效抽速870 L/s,按照50 Hz 最大频率计算,气体载荷为5×103 Pa·L/s,再代入式(3),计算可得此时的压强大概为5.74 Pa。分子泵在Pa量级抽速有所下降,我们重新计算,取抽速为600 L/s,再次代入式(3),得到压强为8.33 Pa。第二级差分室:
. [0 E& f3 w' J; q) | w4 t# \ I) I) O7 S8 g9 R7 d. W6 K. e
推进气体在进入第二级差分室之前,需要经过一段内径6 mm,长度2 m 的细长管道。根据平均压强公式,细管内的平均压强约为4 Pa,PD≈0.24 Pa·m,介于6.65×10-3 Pa·m 和0.67 Pa·m之间,处于粘滞- 分子流。根据粘滞- 分子流流导公式(4):
* I+ H2 ], e' W5 [9 A. T# i
- m+ _5 f# B0 }" P
( k; {4 ^; D" n' S& W9 l8 b' p* |( |2 K
查相关表格知J 约为3.08,代入式(4)得管道流导为4.02×10-2 L/s,最大气体流量为Q=U×8=3.21×10-1 Pa.L/s。在根据公式(3),得第二级差分室的压强不会大于3.69×10-4 Pa,小于表2中对第二级差分真空的工作状态要求。基本可以忽略高频弹丸系统推进气体对EAST 装置的影响。 # x7 F# H+ z9 x" z$ s( Z& n; [
* w( d; h3 z, c9 P- L5 R
2.3、真空测量系统 6 S/ |! I/ A) a' R- C
+ @/ y: E: T9 O/ S0 T; | } 为了能实时地监测各部分真空状况,保证系统的各部件能够正常运作,在缓冲室以及两级差分室上都安装有测量用规管。缓冲室正常工作时的压强较高,大致在百帕量级;而两级差分室的工作压强较低,主要是第二级差分室正常运行时的压强要求保持在10-4 Pa 以下。 & X. J, L9 y, H1 _1 m7 X& b
1 W' g; x3 i! g" p" B1 A9 z9 z& i6 m
除了弹丸注入本身的真空测量点外,真空系统上一共有5 个测量点。在缓冲室的三个真空室上分别安装三个TRP 280 规管,在两级差分室上安装两个PKR 251 规管。系统运行期间,通过读取规管示数来确保各系统都处于正常工作范围,出现异常时及时采取措施,避免系统损坏。 " v3 L2 x/ h; \
1 j; r, a' i2 _' ?9 @2 H. N- H) S
真空度的读取和记录是通过规管连接到真空计和PLC 实现的。真空计主要是在现场测试时起实时监控读数的作用;而PLC 则是远程控制和记录真空数据变化,方便后期查看真空度的历史曲线,查看系统运行的可靠性。系统上各插板阀和真空泵组均能通过PLC 的方式远程控制,进行开关操作,在遇到故障时能及时进行远程处理。 7 [" r3 m' W s+ ~
3、总结 & |* H8 \* P3 y* m
- Y! _# |; @* k 上述计算结果表明,前端缓冲室确实能及时地抽走氦气,并使各泵组工作在最佳状态下,降低了氦气进入挤压成冰室的可能性,提高了成冰质量;且两级差分真空也进一步地降低系统真空度,起到安全连接EAST 主真空的作用。高频弹丸注入装置真空系统的理论设计已经满足了最初的设计要求,现已进入生产制造阶段,系统最快将于2015 年10 月左右投入使用。未来高频弹丸注入装置搭建完成之后,首先会进行系统检漏和性能测试,在各个频率下测试发射弹丸可靠性,测试真空系统是否能按照设计的要求正常工作,并给出一些初步的实验结果。 |
|

 窥视卡
窥视卡 雷达卡
雷达卡 发表于 2025-7-20 08:51:35
发表于 2025-7-20 08:51:35
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 显身卡
显身卡